Scarab: Environmental Data Collection Robot
Specifications:
Dimensions:
Weight: 5.7kg
Height: 18.73cm
Width: 52.39cm
Length: 47.63cm
Power:
Batteries: NiMH Battery, 6V, 3000mAh
Max Runtime: 10 Minutes
Max Idle: 80 minutes
Sensors:
Oxygen
Carbon Dioxide
Carbon Monoxide
Methane
Hydrogen
Ammonia
Nitrogen Dioxide
Temperature
Humidity
Images:

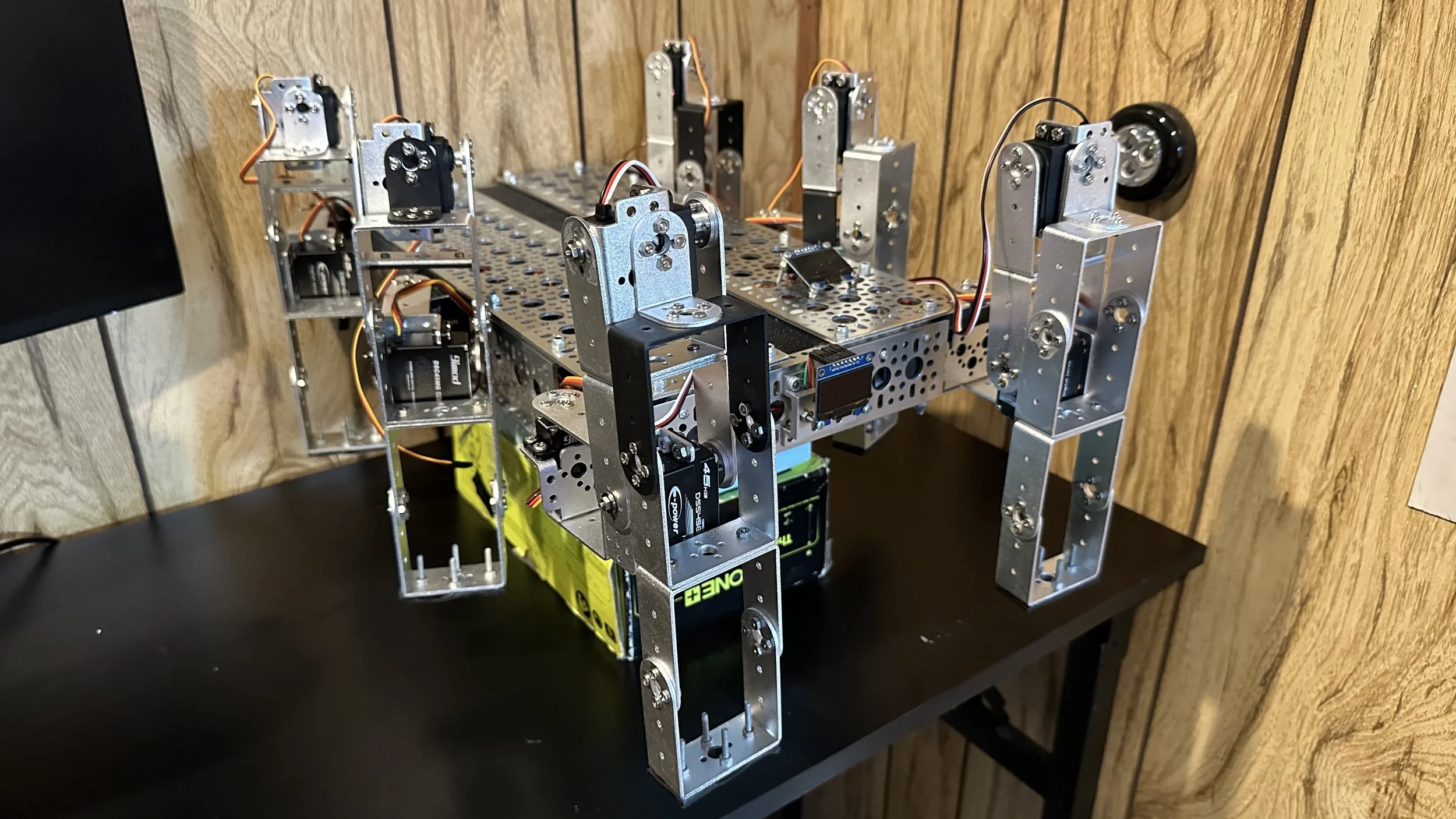
Version I:
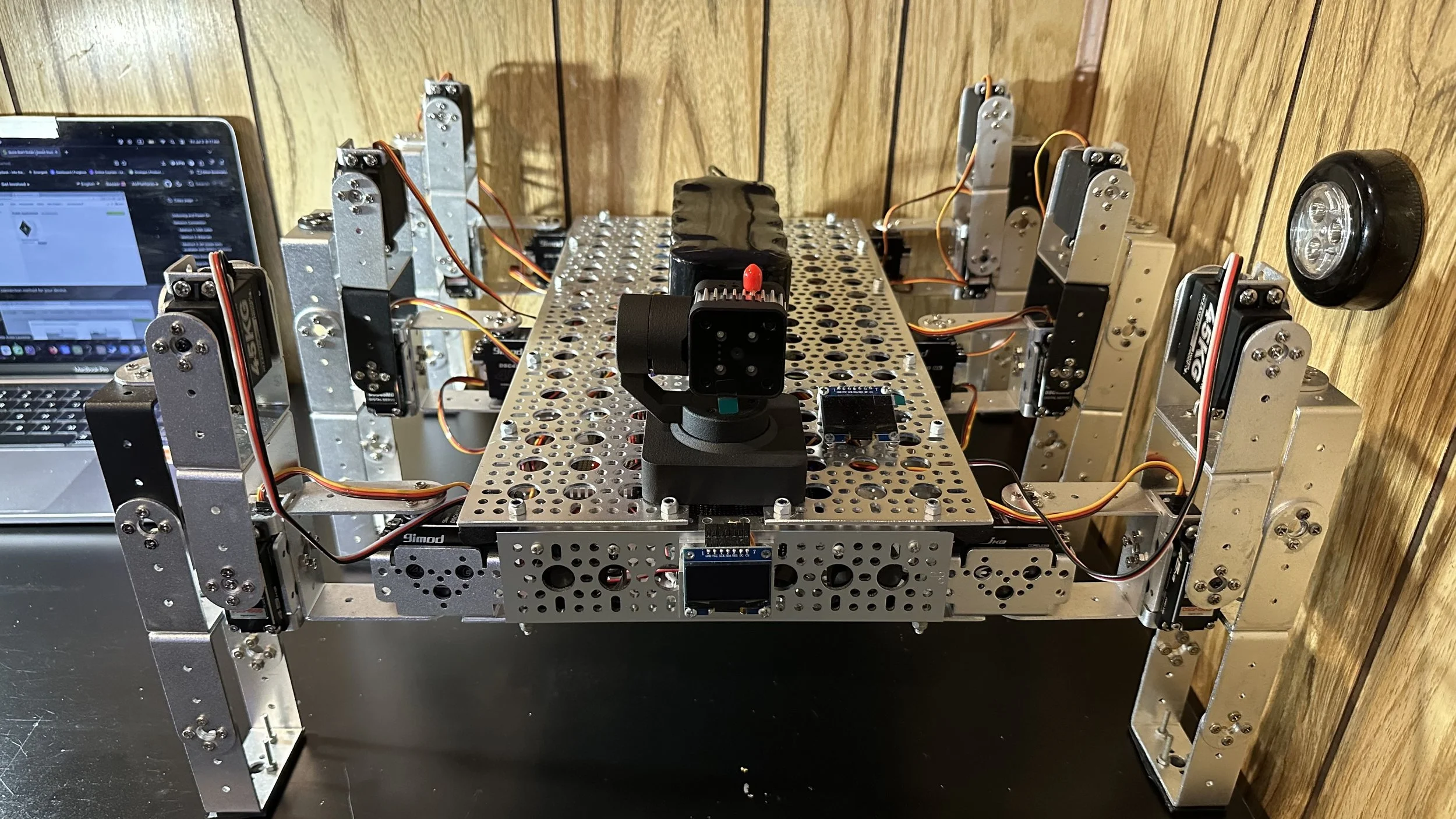
Version II:


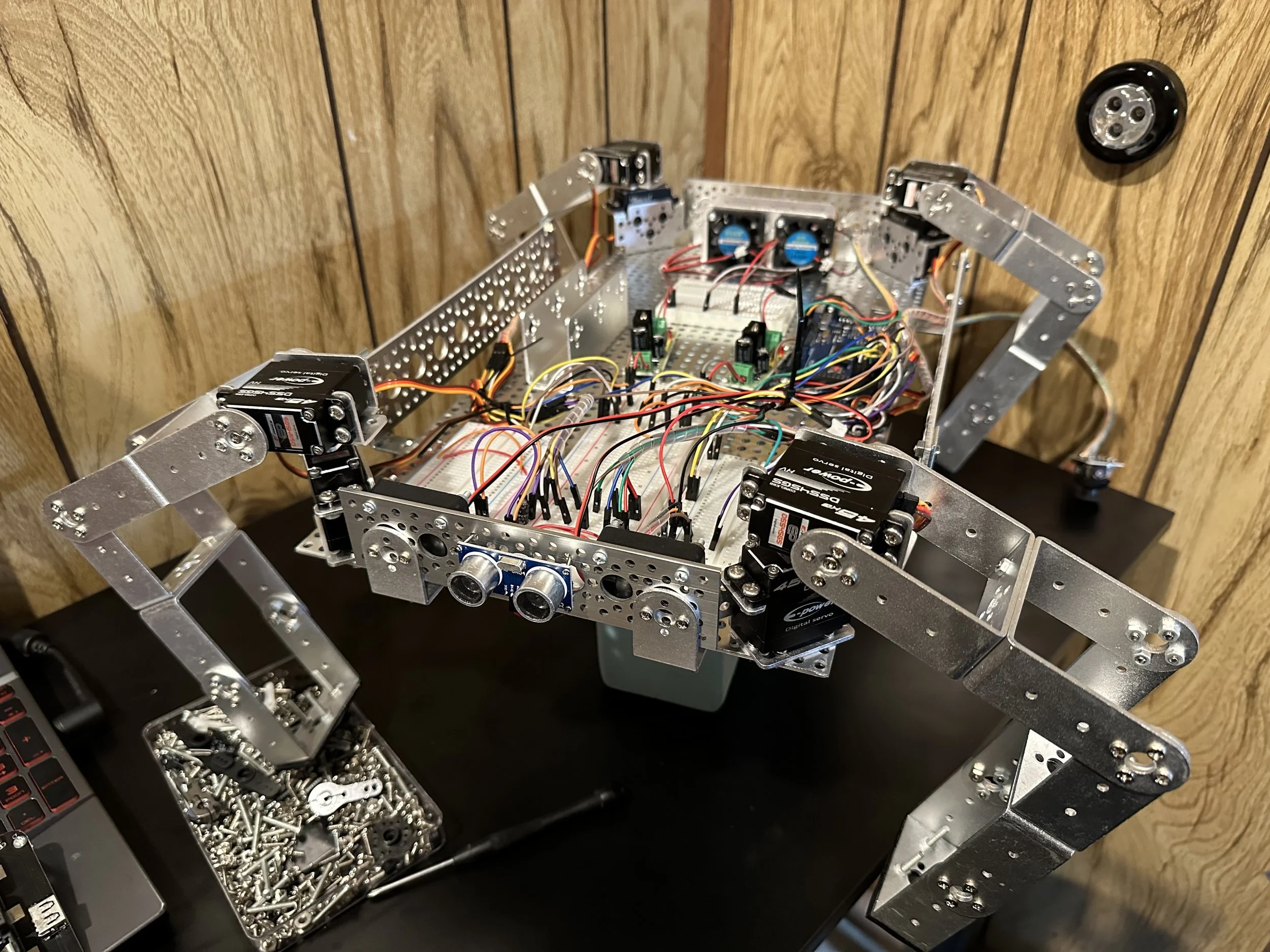
Version II (Updated):
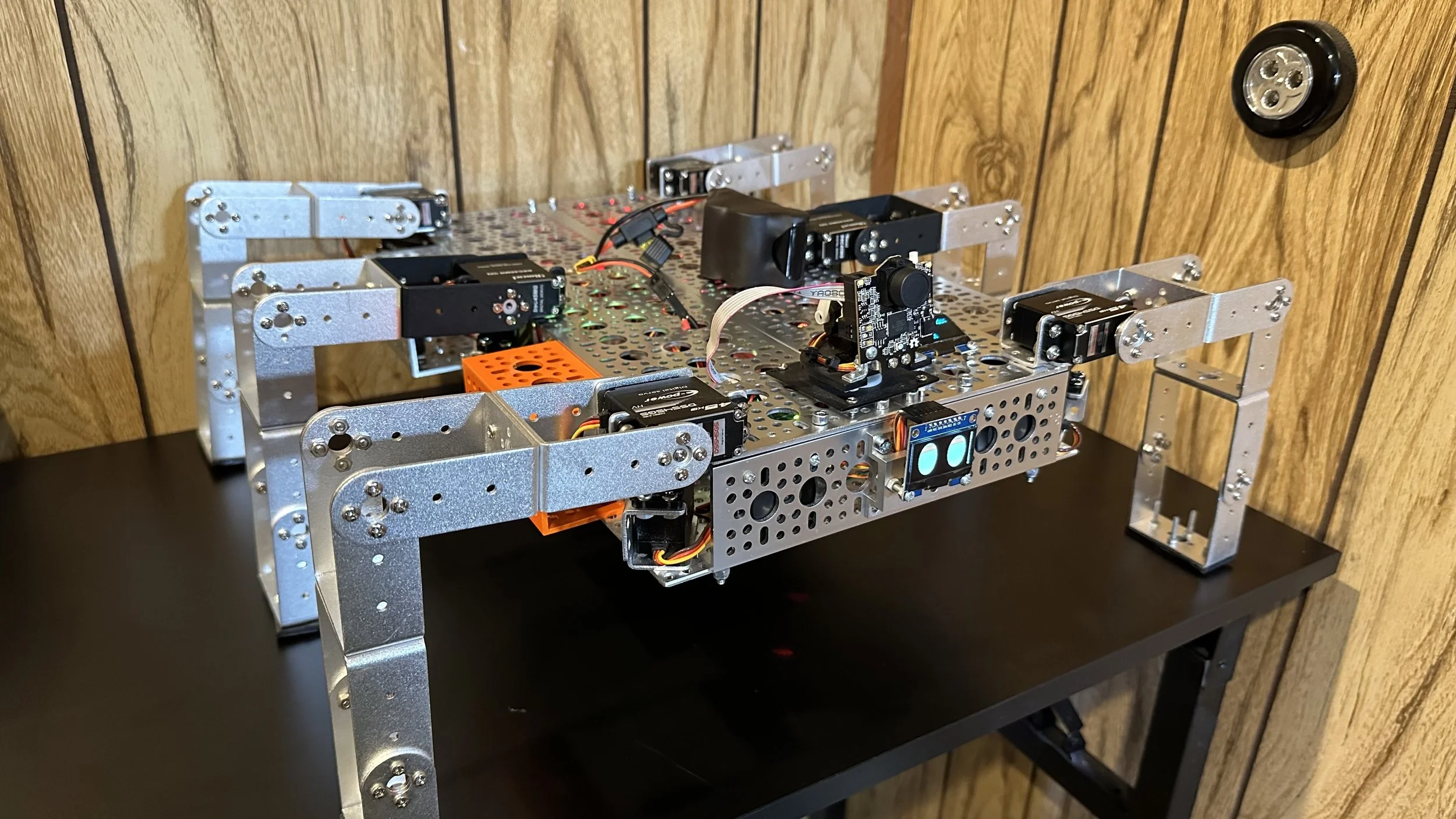
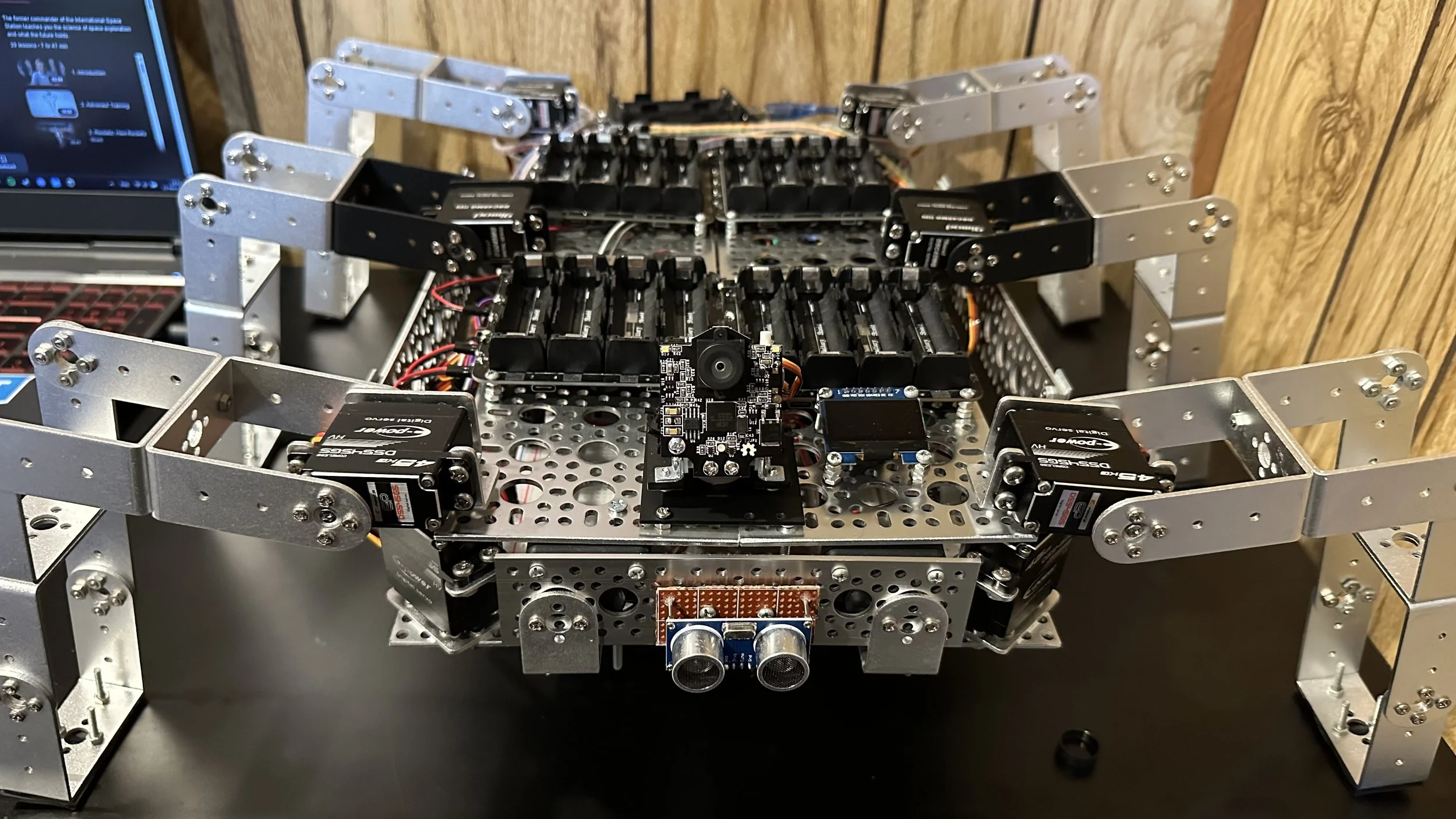
Version III: